פורסם בתאריך April 07 2016
פרוטוקול ה-Ethernet פותח לראשונה במהלך שנות ה-70 והחלו להשתמש בו בצורה מסחרית במהלך שנות ה-80. בסוף שנות השמונים הפך ה-Ethernet לטכנולוגיית הרשת הדומיננטית. בתחילה, השימוש היה לצורך חיבור מערכות מחשב לציוד היקפי, במה שנקרא רשת תקשורת מקומית (Local Area Network) ומהר מאוד התפתח להיות פרוטוקול המשמש לרשתות מרחביות (Wide Area Network). בשלב הבא, הגיע האינטרנט לרחבי העולם (World Wide Web) והאינטרנט השתלב בכל היבט של תקשורת. באמצע שנות התשעים, הפופולריות של ה-Ethernet חדרה גם למערכות הבקרה. המהנדסים של חברת Galil Motion Control החליטו כי ה-Ethernet הינו פרוטוקול אמין ומוכח והציגו לשוק את הבקר הראשון מתוצרתם המבוסס על תקשורת Ethernet. גם כיום, Ethernet היא השיטה הפופולרית ביותר של תקשורת רשת במערכות בקרה.
עידן טרום ה-Ethernet לפני שה-Ethernet נחשב ישים עבור מערכות בקרה, מספר פרוטוקולי תקשורת אחרים היו פופולריים, כגון: תקשורת Bus-based שבה הבקר מוקם בחריץ ייעודי בתוך המחשב. פתרון זה היה יחסית מסורבל, משום שהמחשב היה צריך להיות גדול מספיק, כדי שיכיל את בקר התנועה. כמו כן, המחשב מוקם בסמוך למכונה, שלרוב היתה רועשת ומלוכלכת. תקשורת טורית מסוג Daisy-Chain שאיפשרה לבזר מערכות. הרשת היתה מורכבת מכמה בקרים עם בקר ראשי. הבקר הראשי היה משדר חבילות מידע (packets) להתקן הראשון. ההתקן הראשון קרא את הכתובת של חבילת המידע ואם הוא היה הנמען הוא היה שומר אצלו את תוכנה של חבילת המידע ואם לא, היה מעביר הלאה ליחידה הבאה. תקשורת זו היתה מאוד איטית עם קצב שידור של 9600 Baud rate. תקשורת RS-485 multi-drop שאיפשרה קבלת נתונים בקרב מספר רב של בקרים בו זמנית, אבל גם באופן הזה, קצב העברת המידע היה איטי מאוד, וחבילת המידע היתה קטנה. תקשורות נוספות של רשתות תקשורת טוריות נעשו פופלאריות. פרוטוקולים אלו היו מועילים כל עוד המידע המועבר היה קצר, פשוט וחוזר על עצמו. חלקם עדיין בשימוש בקרב מערכות בקרה. חברות שונות פיתחו פרוטוקולי תקשורת טוריים כגון CANOpen, Profibus, MultiNet ו-DeviceNet לשימוש עצמי במערכות הבקרה שלהן משום שנזדקקו ליכולות מועשרות בהשוואה ליכולות של הרשתות הטוריות הבסיסיות. הפרוטוקולים נדרשו לאפשר את היכולות המועשרות שהציעה חומרת מערכת הבקרה. בשל העובדה שהפרוטוקולים הללו היוו קניין רוחני וחלק מפתרון מסוג ‘turn-key’, הם היו יקרים ומנעו אפשרויות שילוב בין התקנים שונים. לקוחות היו “שבויים” אצל ספקי החומרה, התוכנה והתמיכה עבור פתרונות אלה, הגיעה בלעדית מהספק. במהלך שנות התשעים, רשת ה-Ethernet סיפקה תחליף לתקשורות אלו, כשהפכה לגמישה ובמחירים סבירים. ה-Ethernet הפך לזמין בכל מקום, חומרה תואמת הפכה לנגישה ובמחיר זול יחסית, ולכן התפשטה במהירות. אולם, האם פרוטוקול תקשורת לא דטרמיניסטית כמו Ethernet, הינו הפתרון הנכון עבור מערכות בקרת תנועה?
רשתות דטרמניסיות ולא דטרמניסטיות מה ההבדל בין רשתות דטרמניסטיות ולא דטרמניסטיות? רשת לא דטרמנסינטית מאפשרת לכל רכיב הנמצא ברשת לשדר בכל זמן. הרשת יכולה להיות מורכבת ממספר רב של התקנים מסוג master והתקנים מסוג slave, הרשת יכולה להיות סגורה (לא מחוברת לעולם החיצון) או פתוחה (מחוברת לעולם החיצון, לדוגמא באמצעות אינטרנט). החסרון של רשת זו הינו, האפשרות להתנגשויות בין חבילות מידע. התנגשויות אלו מתרחשות כאשר כמה התקנים שונים משדרים בו זמנית. TCP/IP over Ethernet לדוגמא, הינו פרוטוקול רשת לא דטרמניסטי. לרשת דטרמניסטית יש השהייה מובטחת קבועה בעבור כל העברת מידע. רשת דטרמניסטית מכילה master אחד ואילו כל שאר ההתקנים הינם מסוג slave. החסרון של רשת דטרמניסטית הינו, שבמקרה וזמן שידור אינו מנוצל, הוא למעשה מבוזבז. CanOpen ו-EtherCAT הם דוגמאות לפרוטוקולי תקשורת דטרמניסטים. השאלה האמיתית היא: האם התנגשויות ברשת לא דטרמניסטית סגורה רלוונטיות בכלל למערכות בקרה? התנגשויות מתרחשות כאשר שני התקנים משדרים בדיוק באותו הזמן, אירוע שהוא למעשה נדיר אפילו ברשתות פתוחות, בהן יש לכאורה מספר לא מוגדר של התקנים ונתונים משודרים. לכן, מאוד לא סביר שהתנגשויות יגרמו לעיכובים בעייתיים למערכות בקרה, כאשר הן משתמשות ברשתות סגורות לא דטרמניסיטיות. ישנם מקרים מסוימים במערכות בקרה, בהן רשת דטרמיניסטית הינה חשובה לצורך העברת נתונים. דוגמא טובה לכך הינה בקרה מבוזרת שבה התקנים הנמצאים בסמיכות לציר המונע, רחוקים מהבקר הראשי ומחוברים אליו עם כבלי תקשורת ארוכים (במרחק מספר מטרים רב). במקרה כזה חשוב שהמידע יגיע באותו הזמן בכל פעם. מספר יצרנים של בקרי תנועה, בדומה ל-Galil, פיתחו בקרי תנועה משלהם כך שהם למעשה “סוגרים” את חוגי הבקרה בתוך הבקר. בקרה זאת נקראית בקרה מסוג centralized. זו למעשה סיבה אחת מדוע רשת דרטמניסטית אינה הכרחית ביישומים, בהם משולבים בקרי התנועה של חברת Galil motion control.
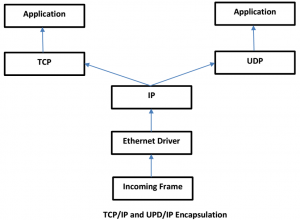
אפשרויות Ethernet עבור מערכות בקרה. שני פרוטוקולי ה-Ethernet הנפוצים ביותר הם פרוטוקול UDP/IP ופרוטוקול UDP/IP הינו השימוש הבסיסי של תקשורת Ethernet. בפרוטוקול הזה למעשה לא נוצר חיבור ולכן, יש פחות התקשרויות בין התקני master להתקני slave, והרכיב המשדר לא מבקש לקבל אישור מהרכיב המקבל. התוצאה היא, תפוקת רשת גבוהה ויכולת התאוששות מהירה, במקרה של שגיאה. אך עם זאת, אם מתרחשת שגיאה, רכיב ה-master לא יזהה באופן אוטומטי את הבעיה. UDP/IP מתאים למערכות בקרה ברשתות סגורות בלבד. ראה איור 1. TCP/IP הוא פרוטוקול תקשורת ה-Ethernet הנפוץ ביותר. פרוטוקול זה מבטיח כי חבילות המידע מגיעות בסדר הנכון, דבר הכרחי במקרה של הזרמת כמות רבה ורציפה של נתונים כגון וידאו ומוסיקה. TCP/IP מבטיח בנוסף כי לא יהיו חבילות מידע שילכו לאיבוד, ומספק בקרת תעבורה שהינה הכרחית, במקרים של רשתות פתוחות כגון האינטרנט. במערכות בקרה ברשתות סגורות, מקרים של איבוד חבילות מידע נובעים בד”כ מבעיות הנדסיות, כגון רעש חשמלי. גם נושא של עומס תעבורת מידע אינו מהווה בעיה, משום שלמהנדס יש שליטה מלאה על התעבורה ברשת. TCP/IP הינו מתאים עבור רשתות גדולות סגורות. לדוגמא, ביישומי אוטומציה במפעל בו יש תנועה כבדה, כבילה ארוכה, והתקנים רבים מסונפים. ראה איור 1.
ASCII over UDP/IP ASCII over UDP/IP זהו פרוטוקול תקשורת פשוט, לא דטרמניסטי, שמתבצע באמצעות מחרוזות טקסט. יצירת ההתקשרות קלה ומושגת באמצעות פתיחת ערוץ UDP ושליחת רצף של תווים. השימוש הטוב ביותר של פרוטוקול זה הינו ביישומים בהם מועברות פקודות תנועה מבקר ראשי למשני בחוג סגור. זהו פרוטוקול מאוד אמין ליישומים פשוטים ולא מצריך תוכנה ייעודית של חברה נוספת. חברת Galil משתמשת בהעברת ASCII ע”ג UDP/IP בדור הנוכחי של תוכנת המשתמש (GUI).
ASCII over TCP/IP ASCII over TCP/IP זהו פרוטוקול תקשורת לא דטרמניסטי, שמתבצע באמצעות שליחת וקבלת מחרוזות טקסט בין התקנים. כמו במקרה של ASCII ע”ג UDP/IP יתרון משמעותי של הפרוטוקול הוא, שניתן לנהלו באמצעות Telnet או socket, ואינו מצריך תוכנה ייעודית של חברה נוספת. פרוטוקול זה גם מתאים עבור רשתות שליטה מורכבות עם התקנים רבים. פרוטוקול זה טוב לרשת פתוחה, אך חברתGalil לא ממליצה על רשתות תקשורת פתוחות עבור מערכות בקרה, בשל האפשרות שמידע לא רצוי יגיע ממקור חיצוני ויהווה בעיית בטיחות, הן עבור המכונה והן עבור מפעילה. חברת Galil motion control משתמשת ב-ASCII ע”ג TCP/IP בתוכנת המשתמש (GUI).
ModBus TCP ModBus TCP הינו פרוטוקול תקשורת לא דטרמניסטי נוסף ושימושי, בעיקר כאשר היישום דורש שיתוף של כניסות ומוצאים מכל הסוגים ובנוסף להם גם שימוש במערך נתונים. ברגע שנבנתה התקשורת בין הרכיבים, ניתן להשתמש בשפת התכנות המקורית של היצרן. בשל העובדה ש-ModBus מספק ממשק להתקנים של ספקים חיצוניים, ביכולתו לספק תמיכה ברמה טובה. דוגמא ליישום אופייני הינה מכונה לביקבוק ופקיקה שמצריכה בקר תנועה שיספק ביצועים גבוהים, בשליטה על מרכיבי התנועה ושינהל במקביל, כמות רבה של כניסות ומוצאים דיגיטליים ואנלוגיים.
Ethernet/IP עוד פרוטוקול תקשורת לא דטרמניסטי שפותח על פלטפורמת ה-TCP/IP הינו ה-Ethernet over IP. פרוטוקול זה משלב טכנולוגיות Ethernet סטנדרטיות עם פרוטוקול תעשייתי משותף (CIP) המספק יכולת תכנון מבוססת עצמים, הנדרשת ביישומי בקרת זמן אמת. הדבר מאפשר להתקנים מיצרנים רבים לחלוק פקודות I/O ומתבטא בהטמעה עקבית של פונקציות אוטומציה במגוון רחב של מוצרים. יישומים לדוגמא הם אוטומציה של רצפת ייצור, כאשר התקן PLC הוא השולט במספר רב של בקרי תנועה. בקר ה-PLC שולח מיקומי יעד לכל בקר תנועה, שמתפקדים בצורה אוטונומית, ובקרי התנועה מדווחים חזרה ל-PLC עם הגעת המנוע למיקום הרצוי.
EtherCAT פרוטוקול EtherCAT שהומצא ע”י Beckoff Automation, מבוסס על פרוטוקול תקשורת CANopen ונבנה על שכבה פיסית של Ethernet. זהו פרוטוקול התקשורת הדטרמניסטי הנפוץ ביותר היום, בשימוש מערכות הבקרה, ומשמש בד”כ ביישומים הדורשים זמני עדכון מידע מהירים וסנכרון מדוייק. פרוטוקול ה-EtherCAT מאפשר בקרה מבוזרת בחוג סגור ומתאים ליישומים בהם מרכיבי פלטפורמת הבקרה רחוקים פיסית אחד מהשני (הכבילה בין הבקר לדרייבר הקצה ארוכה יחסית). חברת Galil motion control השיקה לאחרונה את בקר התנועה ה-DMC-500×0 שהוא גם מנהל EtherCAT לצורך שליטה על דרייברים (ומנועים) רחוקים, כאילו ישבו בתוך הבקר. בקר DMC-500×0 הינו החדיש ביותר מתוצרתה של חברת Galil Motion Control וגם הראשון מתוצרתה שמשלב את תקשורת ה-EtherCAT בתוכו. מנהל ה-EtherCAT פועל באופני שליטה מחזוריים של חוגי מומנט ומיקום. במארז הנוכחי ניתן לבקר על כשמונה צירים על גבי תקשורת ה-EtherCAT. בקר ה-DMC-500×0 ניתן לקינפוג כך שארבעת הצירים הראשונים יבקרו באמצעות ה-EtherCAT, או שהבקר יכיל מגברים פנימיים למנועי סרוו או צעד, צירים מספר חמש עד שמונה, יהיו בכל מקרה צירי EtherCAT בלבד. בקר ה-DMC-500×0 שייך למשפחת הבקרים מהדור האחרון של החברה המתממשקת בפרוטוקולים ETH ו-RS232. יכולות העיבוד של הבקר כוללות פונקציות DSP שמאפשרות ביצועים, זמן חישוב ויכולות עיבוד מתקדמות. הבקרים, המאוד קומפקטים, מגיעים במארז מתכת, כוללים לוח תצוגה וניתן להשיגם עם סוגי דרייברים שונים ונועדו ללקוחות OEM, אשר צריכים בקרים מרובי צירים, בעלי ביצועים משופרים, כגון זמן עיבוד פקודה מהיר וקצבי דגימה גבוהים. ההתקנים המחוברים באמצעות ה-EtherCAT מנוהלים בדיוק באותו אופן שהיו מנוהלים אם היו נמצאים פיסית בתוך המארז של בקר התנועה. דבר זה מאפשר כמובן למתכנת האפליקציה להמשיך ולהשתמש בשפת התכנות של Galil. דוגמאות למערכות בקרה מבוססות EtherCAT יכולות להיות מכונות לתעשיית ה-(Flat Panel Display), מכונות אריזה ומכונות הרכבה, בהן המגברים ממוקמים רחוק משמעותית מבקר התנועה הראשי.
העתיד של ה-Ethernet ומערכות הבקרה אילו שינויים במערכות בקרה ברשת אפשר לצפות בשנת 2015 והלאה? האם רשתות מערכת בקרה יעברו את השינויים שראינו אצל רשתות פתוחות (אינטרנט), כגון רוחב פס רחב ושימוש הולך וגדל של תקשורת אלחוטית? ברשתות בקרת תנועה, חבילות המידע הינן בדרך כלל סטנדרטיות, פשוטות וקטנות. הן לא מצריכות את רוחב הפס הנדרש לתקשורת האינטרנט משמע רשתות בקרת תנועה לא יהנו ממעבר מהירות הרשת לג’יגה ביט. כיום, תקשורת אלחוטית אינה בטוחה דיה עבור יישומים של בקרת תנועה, אך הדבר יתאפשר במידה והתעבורה האלחוטית תהפוך לבטוחה ומוגנת. עם התגברות השימוש באינטרנט בתחום הבנקאות, השירותים הציבוריים ובקרב גורמים פרטיים גדולים אחרים, ספקי האינטרנט האלחוטי מתמקדים בהפיכת התקשורת האלחוטית, לבטוחה יותר. ‘Internet of things’ הינו טרנד נוסף בתעבורת רשת שייתכן ויזלוג גם ליישומים של מערכות בקרה. גלאים חכמים כמו פוטנציומטרים או מונה סיבובים תעשייתי, יכולים לשדר מידע דיגיטלי להתקן הראשי בתקשורת חוטית או אלחוטית. הגלאים הינם קומפקטים, אמינים, לא יקרים וקלים לתפעול. בעתיד לא מן הנמנע שנראה התקנים במערכות הבקרה, שיתממשקו על גבי הרשת לכל אותם סנסורים חכמים. בעולם של בקרת התנועה, הגמישות והנוחות של ה-Ethernet מאפשרת פלטפורמה טבעית להעברת מידע בין התקנים. מהנדסים יכולים לבחור כרצונם בפרוטוקול ה-Ethernet המתאים בצורה הטובה ביותר לאפליקציה שלפניהם. לדעת חברת Galil motion control, ה-Ethernet ימשיך להוות פרוטוקול הרשת הנפוץ למערכות בקרה לעוד זמן רב. חברת Galil פעילה במגוון תחומים רחב כגון: צבאי, רפואי, מוליכים למחצה, דפוס, אלקטרוניקה ועוד. ידיעה זו פורסמה ע”י חברת Galil Motion Control ותורגמה לגליון זה ע”י מוני ברק, מנהל טכנולוגיות ויישומים בחברת מדיטל קומוטק, העוסקת במתן פתרונות טכנולוגיים ובהספקת מערכות ורכיבי איכות לתעשיות ההיי-טק בישראל, והינה נציגת חברת Galil Motion Control בישראל.